영상의 특징값
- 특징값(feature) :영상 내에서 다른 부분과 구분되어 두드러지는 성질
- 점(point)
- 엣지(edge, 경계선, 외곽선)
- 코너(corner, 모서리)
- 질감(texture)
- 색상(color)
- 특징값은 영상 내에서 특정 사물의 위치를 찾는데 사용될 수 있고, 특정 영상과 다른 영상의 유사성을 판단 하는 기준으로도 사용 될 수 있음
마스크를 이용한 엣지 검출
- 이산 함수의 미분 근사 방법
엣지(edge)
- 배경과 객체의 경계가 되는 부분으로, 일반적으로 엣지에서 는 픽셀의 밝기 값이 급격하게 변함
함수의 1차 미분(1st derivative)
- 함수 f(x, y)의 x 축 방향으로의 미분
- 값의 변화량 = 기울기 사용해서 미분함
- 영상 미분 -> 특정한 임계값 t 보다 큰 부분이 엣지임
1차 미분의 근사화(approximation)
- 미분은 연속함수에서만 실행
- 이산함수에 해당하는 영상에 적용하기 위해 근사화 필요함
- h = 픽셀간의 간격 = 1

영상의 그래디언트(gradient)
- 함수 f(x, y)를 x축과 y 축으로 각각 편미분(partial derivative) 하여 벡터 형태로 표현한 것
- 벡터 형태로 표현했기에 그레디언트의 크기와 방향 성분 표현이 가능

- 그레디언트 크기는 변화의 정도를 나타내는 척도
- 그래디언트 방향은 그레디언트 벡터가 가르키는 방향, 경사가 가장 심한 방향, 변화의 정도가 가장 심한 방향
다양한 엣지 검출 마스크
- 로버츠: 2x2 마스크, 대각선 방향
- 프리윗: 3x3 마스크, 세로나 가로 방향
- 소벨: 3x3 마스크, 가중치를 줌으로써 엣지 뚜렷하게 검출됨
단점
- 엣지 주변의 여러 픽셀들이 한꺼번에 엣지로 검출
- 엣지가 이어지지 않고 끊어지는 부분이 있음
캐니 엣지 검출기
좋은 엣지 검출기의 조건 (J. Canny)
- 정확한 검출(Good detection): 엣지가 아닌 점을 엣지로 찾거나 또는 엣지인 점을 검출하지 못하는 확률을 최소화해야 한다.
- 정확한 위치(Good localization): 실제 엣지의 중심을 찾아야 한다.
- 단일 엣지(Single edge): 하나의 엣지는 하나의 점으로 표현되어야 한다.
-> 이러한 조건을 만족하는 새로운 형태의 엣지 검출 방법을 제안 "캐니 엣지 검출기"
소별 엣지 검출 방법이 단순히 그래디언트 크기만을 이용해 엣지 픽셀을 찾았음....
캐니 엣지 검출기의 특징
- 그래디언트의 크기와 방향을 모두 고려함 -> 정확하게 엣지의 위치를 찾을 수 있음
- 엣지의 진행 방향에 또 엣지가 나타날 가능성이 높다는 점을 고려함 -> 그레디언트가 다소 약하게 나타나는 엣지 픽셀도 놓지지 않을 수 있음
- 그래디언트 크기가 크다 = 기울기가 크다 = 엣지이다.
- 그래디언트는 함수를 편미분하여 벡터로 표현한 것으로, 방향과 크기를 갖는 기울기임 !!
캐니 엣지 검출 방법
- 가우시안 필터링 : 영상 부드럽게 만들기 참조
- 그래디언트 계산 : 주로 소벨 마스크를 사용
- 비최대 억제 (Non-maximum suppression) : 하나의 엣지가 여러 개의 픽셀로 표현 되는 현상을 없애기 위하여 그래디언트 크기가 국지적 최대(local maximum)인 픽셀만을 엣지 픽셀로 설정 / 그래디언트의 방향 성분을 고려하여 국지적 최대를 검사
- 히스테리시스 엣지 트래킹 : 두 개의 임계값을 사용: TLow, THigh / 강한 엣지: 그래디언트 크기가 THigh보다 큰 픽셀 → 최종 엣지로 선정 / 약한 엣지: TLow보다 크고 THigh보다 작은 픽셀 → 강한 엣지와 연결되어 있는 픽셀만 최종 엣지로 선정
허프 변환을 이용한 직선 검출(직선 성분 찾는 알고리즘)
허프 변환(Hough transform)
- 2차원 영상 좌표(xy공간)에서의 직선의 방정식을 파라미터 (parameter) 공간(ab공간)으로 변환하여 직선을 찾는 알고리즘

- xy 공간에서 a는 기울기이고, b는 y절편
- 이 직선의 방정식은 2차원 xy 좌표 공간에서 정의
- a와 b는직선의 모양을 결정하는 파라미터
2차원 xy 공간에서의 직선의 방정식을 파라미터 공간인 ab 공간으로 변형하면???
- 2차원 xy 공간에서의 직선 -> ab 공간에서 한 점
- 2차원 xy 공간에서 한 점 -> ab 공간에서 직선
- 허프 변환은 이런 현상을 이용해서 xy 공간에서 엣지 좌표를 허프 공간에서 직선 형태로 찾음
- 2차원 xy 공간에서 점 -> 파라미터 공간에서 두 직선은 서로 같은 직선에 존재했었기 때문에 교차점을 가짐 -> 이 교차점은 2차원 xy 공간에서 (기울기, y 절편)
- 즉 많은 수의 직선들이 교차할수록 원래 2차원 xy 공간에서 같은 직선에 존재했던 점이 많다는 소리
축적 배열
- 일반적인 2차원 배열을 이용하여 만든 후, 해당 직선 성분의 값을 1씩 증가시키는 배열(직선이 지나가는 위치의 배열 원소값 +1)
- 허프 변환을 통해서 직선의 방정식을 찾기 위해서는 xy 공간에서 엣지로 판명된 모든 점의 좌표를 ab 파라미터 공간에서 직선으로 그려주고, 직선들이 많이 교차되는 점을 찾으면 됨
- 이때 직선이 교차하는 점을 찾기 위해 "축적 배열" 사용
직선의 방정식 y = ax + b 를 사용할 때의 문제점
- y 축과 평행한 수직선을 표현하지 못함 ➔ 극좌표계 형태의 직선의 방정식을 사용


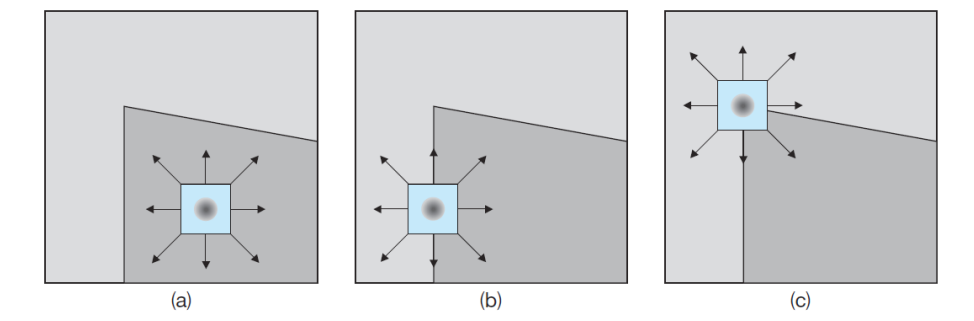
해리스 코너 포인트
해리스 코너 포인트 검출 방법
- 1988년 C. Harris가 제안한 방법
- 영상 내에 정의된 윈도우(window)안의 픽셀 값이 상하좌우 방향으로 모두 급격하게 변하는 위치를 코너로 규정

코너 응답 함수(corner response function)

실제 영상에서 해리스 코너 포인트 검출 결과
- 영상의 크기, 회전 등의 기하학적 변환에 무관하게 코너 포인트를 검출
- 다양한 영상 처리 분야에서 특징점 (feature point) 검출 방법으로 사용
'영상처리' 카테고리의 다른 글
| [영상처리] 영상의 기하학적 변환 (0) | 2023.06.10 |
|---|---|
| [영상처리] 공간적 필터링 기법 (0) | 2023.06.09 |

